Machine vision
ENSA Paris Malaquais
Licence 3 semestre 2
Enseignant : Félix Agid
Encadrant : Tristant Gobin
Etudiant : Clément Gosselin, Paul Poinet, Mathieux Venot
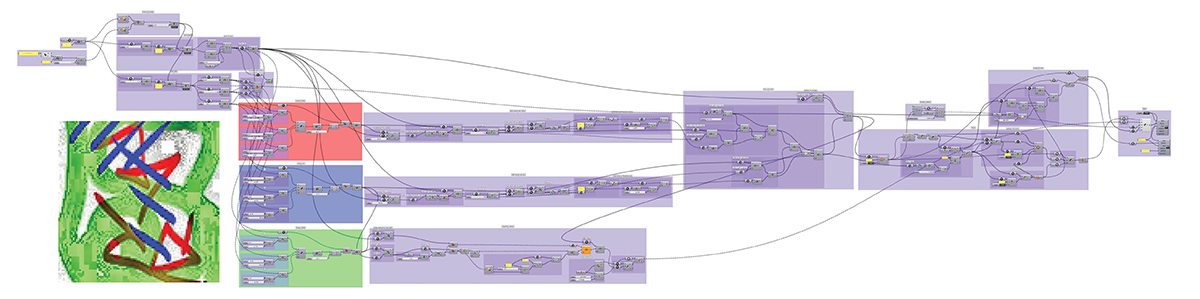
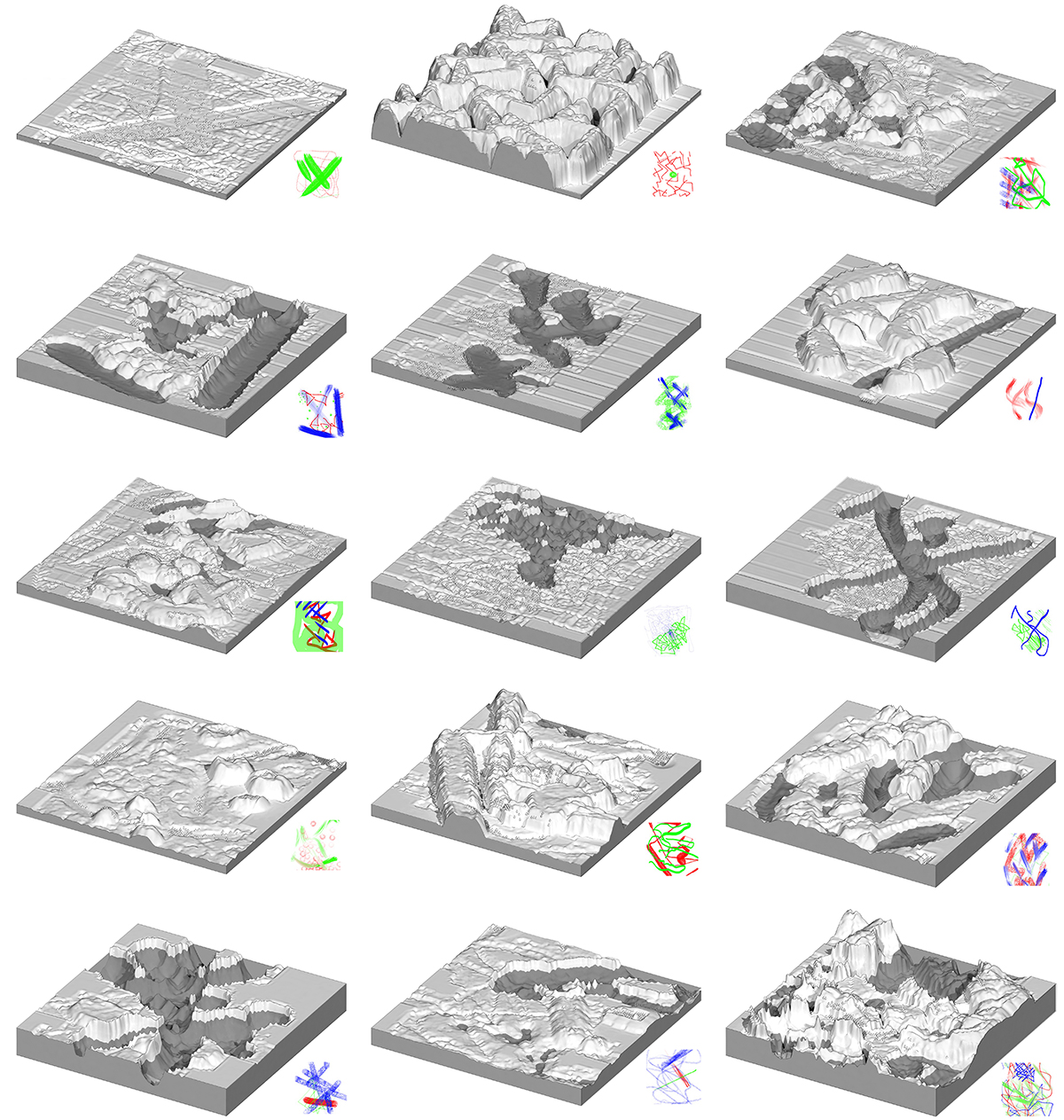
The workshop goal was to create an expérimental protocol that generates an architectural design thought the analyse of the intrinsic data of a territory by using industrial machine vision tools (Robotrealm). This workshop containe introduction lectures about machine vision. We studied basic picture algorithm applied to robotic.
Our work was about the automation of picture interpretation. We first create a collection of 50 discrete pictures that follows rigorous drawing rules. Those rules were about colors (green, red and blue), drawing shapes (dots, single line, polyline, curves…) and tool thickness. Each of those drawings were then processed through an algorithm as a territory map at three different scales : the landscape, the city and the building.